[ROS/C++] Using smart pointers in containers
Problem Description:
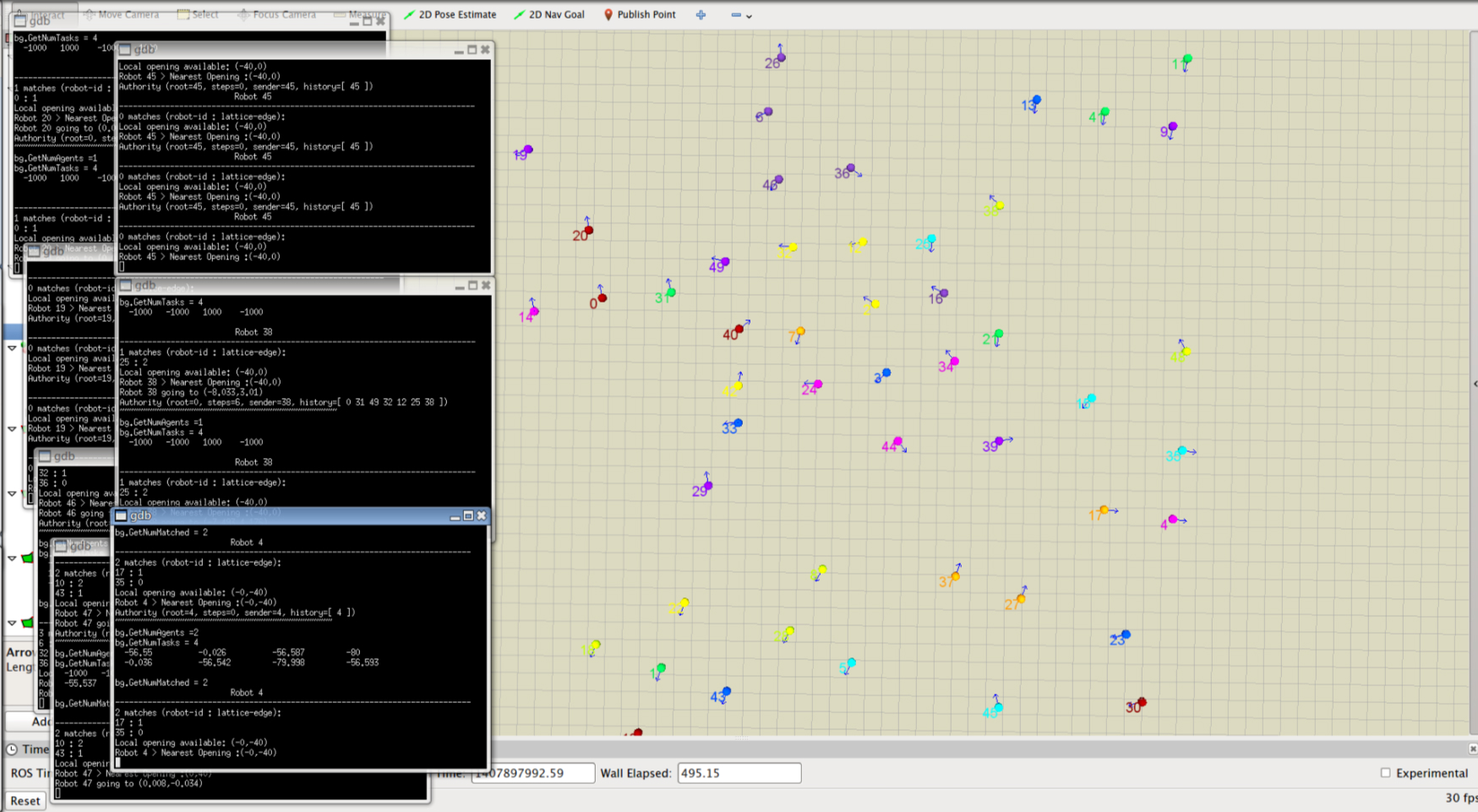
The memory leak problem was found when I tested the ROS simulation of a large number of robots, say, 50. Basically I have one simulator node and 50 robot controller nodes. Occasionally after running the program for a while, the simulator node may throw a bad_alloc exception and then terminated.
Solution:
As these two figures shown, in the launch file, I set the 'launch-prefix="gdb -ex run --args" ' attribute in each <node> tag [1]. (Acturally setting this attribute to simulator node only is enough.)
By observing the information from GDB, I got that in the simulator class I defined, I had a map container, where the robot id (integer) is the key, and the pointer to each simulatedrobot object is the value, like:
class Simulator{
private:
int num_robots;
map<int, SimulatedRobot*> allrobots;
...
};
And in the constructor of the Simulator class, I have following codes like:
Simulator::Simulator(){
for(int i=0; i< num_robots; i++){
SimulatedRobot* sr = new SimulatedRobot(i);
allrobots.insert(map<int, SimulatedRobot*>::value_type(i, sr);
}
...
}
I realized I did not deallocate the memory properly so the memory leaking exists.
By reading C++ Coding Standard Rule 79: "Store only values and smart pointers in containers" [4]. I changed my implementation using std::shared_ptr [2],[3]. Therefore, the code looks like:
class Simulator{
private:
int num_robots;
map<int, std::shared_ptr<SimulatedRobot> > allrobots;
...
};
...
Simulator::Simulator(){
for(int i=0; i< num_robots; i++){
std::shared_ptr<SimulatedRobot> sr = std::make_shared<SimulatedRobot>(i);
allrobots.insert(map<int, std::shared_ptr<SimulatedRobot> >::value_type(i, sr);
}
...
}
References:
[1]. Roslaunch Nodes in Valgrind or GDB
[2]. Smart Pointers
[3]. Shared_ptr
[4]. C++ Coding Standard
2018年5月24日 04:55
By reading C++ Coding Standard Rule 79: "Store only values and smart pointers in containers" [4]. I changed my implementation using std
2018年7月14日 22:29
This is quite helpful option for users of the containers that help them into using of different types of pointers in right way. Writing of essay paper is become easy for us because uk essay writing services with students get best results.
2020年10月24日 23:06
Untuk para wanita yang banyak beraktivitas dengan membawa tas ransel, bisa cek link baca seterusnya untuk melihat koleksi tas ransel wanita di toko kami. Ada banyak ragam tas wanita, pria, dan anak-anak di toko kami, sehingga kamu yg berbelanja tas murah bisa pilih pilih yang sesuai selera. Yuk langsung cek koleksi tas murah kami di, grosir tas murah Bandung. Selain tas ransel, handbag, dan tas selempang wanita, kami juga menyediakan tote bag berbahan kanvas motif yang menarik, cek di sini koleksinya, tote bag murah Bandung. Sedangkan buat kamu yg lebih sering menggunakan tas handbag atau selempang, bisa membuka tautan ini ya, jual tas selempang dan handbag wanita murah.
2021年7月14日 02:37
Caldwells was a huge help in my job as it had what I needed. And just for the record, they were really hard to find and very expensive. I would definitely work with them again. If you want you see more information, click https://caldwells.com/interior-doors/traditional-doors link for their site
2021年8月05日 08:57
Thank you because you have been willing to share information with us. we will always appreciate all you have done here because I know you are very concerned with our. brochure design
2021年8月07日 10:55
Thank you for all your valuable hard work on this website. Betty takes pleasure in engaging in research and it’s really obvious why. I learn all relating to the lively way you render rewarding items on this blog and even improve contribution from the others on this concept so my princess is without a doubt starting to learn a lot of things. Take pleasure in the rest of the year. You have been doing a dazzling job. best microdermabrasion machine professional
2021年8月12日 00:31
cara membuat website dengan mudah di Wordpress merupakan salah satu cara membuat website yang harus anda ketahui jika anda ingin memiliki website dengan tampilan profesional. Wordpress merupakan salah satu platform pembuatan website terbaik karena menawarkan banyak fitur yang memampukan anda membuat website berkualitas dengan mudah. Cara membuat website wordpress dan ganti tema . paket bulan madu murah di Bali bagi anda yang ingin berbulan madu di Bali. Bali memang sangat terkenal sebagai destinasi bulan madu, tidak hanya oleh wisatawan lokal tetapi juga oleh wisatawan manca negara. Bali juga banyak menawarkan paket bulan madu dengan harga yang murah sehingga anda dapat menikmati bulan madu yang indah dengan murah. paket honeymoon bali murah . harga paket honeymoon 3 hari 2 malam Bali menawarkan anda harga yang murah untuk mengunjungi berbagai destinasi wisata romantis di Bali selama 3 hari 2 malam. Paket honeymoon 3 hari 2 malam ini merupakan paket honeymoon yang berimbang antara durasi wisata dengan harga yang ditawarkan, sehingga anda dapat menikmati banyak destinasi wisata Bali dengan harga yang terjangkau. paket honeymoon 4 hari 3 malam Bali . layanan sewa mobil terbaik di Bali di mana anda dapat menemukan mobil yang nyaman untuk anda sewa selama berwisata di Bali. Sewa mobil ini juga telah dilengkapi dengan layanan driver yang ramah, profesional dan berpengalaman untuk mengantarkan anda ke berbagai destinasi wisata di bali dengan aman dan nyaman. layanan sewa mobil di Bali . Paket pulau Tidung akan memberikan anda pengalaman berwisata pulau tidung yang indah. Jika anda menyukai wisata bahari, maka paket wisata pulau tidung merupakan salah satu paket wisata yang wajib untuk anda ambil. Dengan paket pulau tidung ini anda dapat mengunjungi berbagai destinasi wisata pulau tidung yang indah. Pulau seribu . anime comedy merupakan salah satu jenis genre dalam sekian banyak genre anime. Sesuai dengan namanya, anime comedy merupakan anime dengan cerita yang lucu dan tentunya akan membuat anda tertawa lepas. Jika anda ingin menonton anime dengan alur cerita yang lucu dan ringan, maka anime comedy adalah genre anime yang harus anda tonton. anime keren . Cara Nikah Siri adalah cara nikah yang biasanya ditempuh oleh pasangan yang ingin menikah secara rahasia. Siri memang memiliki arti rahasia, namun sama dengan pernikahan pada umumnya, nikah siri juga memiliki syarat sah yang tidak berbeda dengan pernikahan pada umumnya. Pelajari lebih lengkap tentang cara nikah siri yang tepat di sini. Syarat Nikah Siri . jasa foto produk fashion merupakan salah satu jenis jasa yang patut anda pertimbangkan untuk anda gunkanan jika anda ingin serius menjalani dunia jual beli online. Jasa foto produk ini akan memastikan setiap produk fashion anda tampil indah dan menarik perhatian para calon pembeli untuk membeli produk fashion yang anda tawarkan. jasa foto produk . laminasi dingin berfungsi untuk menjaga agar hasil printing dapat bertahan lebih lama. Laminasi dingin merupakan mika bening dengan lapisan lem yang tidak hanya adapat menjaga daya tahan hasil print tetapi juga memberikan tekstur pada permukaan untuk hasil yang unik dan menarik. Dengan laminasi dingin, hasil cetak anda akan lebih tahan lama, tahan gores dan terlihat eksklusif. Kertas luster . snack box murah bekasi merupakan pilihan yang tepat jika anda ingin memberikan makanan ringan berkualitas kepada tamu undangan anda jika anda ingin mengadakan acara di daerah Bekasi dan sekitarnya. Snack box ini biasanya berisikan kue atau berbagai jenis makanan ringan lainnya yang dapat anda bagikan kepada tamu undangan untuk mengganjal perut. nasi box jakarta . manfaat cyber security adalah untuk menjaga keamanan data anda di dunia maya. Cyber security ini sangatlah penting dalam dunia bisnis, sayangnya tidak banyak orang yang menyadari pentingnya manfaat dari cyber security ini. Dengan menggunakan cyber security, data anda akan terjaga dari penggunaan yang tidak sah. menghasilkan uang . pijat cirebon adalah jasa pijat profesional bagi anda yang membutuhkan pijat di daerah cirebon dan sekitarnya. Pijat cirebon ini menawarkan jasa pijat oleh terapis pijat profesional yang handal dan berpengalaman dalam memberikan layanan pijat terbaik di kota cirebon untuk menghilangkan rasa lelah di tubuh anda. Pijat surabaya . Pijat Jakarta juga merupakan jasa yang menawarkan anda layanan pijat profesional di daerah jakarta dan sekitarnya. Sebagai kota yang penuh dengan kesibukan, anda yang tinggal di Jakarta tentu saja sesekali membutuhkan jasa pijat profesional yang dilakukan oleh terapis pijat profesional yang handal dan berpengalaman untuk menghilangkan rasa lelah dari tubuh anda. Pijat Cirebon . review terbaik adalah review produk yang dibuat secara jujur. Dengan review yang jujur anda tentunya dapat memperoleh sudut pandang yang murni terhadap hasil dari suatu produk. Jadi sebelum anda membeli suatu produk atau jika anda bingung produk mana yang terbaik untuk anda beli, yuk baca review terbaik di sini. rekomendasi terbaik . Lightroom Preset adalah fitur dari lightroom yang memudahlan anda dalam melakukan pengeditan warna. Dengan fitur preset ini , anda dapat melakukan pengeditan warna dengan sekali klik saja. Tentu saja semakin banyak variasi preset yang anda miliki maka akan semakin banyak pula variasi pengeditan warna yang dapat anda lakukan dalam sekali klik. Free Lightroom Preset . Tukang Taman Malang akan membantu anda untuk mendapatkan taman impian anda di daerah Malang dan sekitarnya. Tukang taman Malang adalah tukang taman dengan keahlian profesional dan berpengalaman untuk memberikan tampilan yang indah pada taman anda. Dapatkan taman indah di Malang dengan jasa tukang taman Malang. <a href="http://www.farisgarden.com/2020/07/tukang-taman-lamongan-jasa-pembuatan.html>Tukang Taman Lamongan . rafting lembang bandung adalah aktifitas outdoor yang patut anda coba jika berwisata di daerah lembang Bandung. Aktifitas rafting ini akan membawa anda menikmati keseruan bermain rafting sambil menikmati keindahan alam lembang yang sudah sangat terkenal. Jadi jika anda berkunjung ke Lembang Bandung, pastikan anda tidak melewatkan aktifitas rafting yang seru ini. eo wisata bandung . standing pouch murah adalah kemasan makanan kekinian yang sangat praktis digunakan sebagai kemasan makanan. Sesuai dengan namanya, pouch ini dapat berdiri sehingga makanan yang dikemas dapat dipajang di rak market dengan baik. Harganya pun murah sehingga memiliki nilai ekonomis yang sangat baik. standing pouch . Cetak buku agenda adalah salah satu cara jika anda menginginkan buku agenda khusus untuk menjadi bagian dari acara anda. Buku agenda kustom yang di cetak sendiri biasanya digunakan pada seminar-seminar bertaraf tinggi. Buku agenda yang dibuat secara kustom tentu saja akan memberikan image eksklusif pada seminar. jasa buat buku agenda custom . kantong kertas murah adalah solusi terbaru untuk menggantikan kantong plastik. Saat ini kantong kertas mulai banyak disukai oleh orang-orang karena sifatnya yang lebih ramah lingkungan dan juga harganya yang murah dan tidak kalah dari harga kantong plastik. Dapatkan kantong kertas berkualitas dengan harga yang murah di sini. paper bag . Jasa Iklan Adwords akan membantu anda melakukan pemasangan iklan adwords dengan efektif dan efisien. Jasa iklan adwords adalah jasa profesional yang tidak hanya membantu anda melakukan pemasangan adwords tetapi juga memberikan anda jasa konsultasi untuk hasil pemasangan adwords yang maksimal dan terbaik. Jasa Google AdWords . Daftarpenyakit.info adalah situs yang memuat ragam jenis informasi seputar aneka ragam jenis penyakit. Di Daftarpenyakit.info anda dapat membaca informasi tentang gejala berbagai jenis penyakit, obat dan juga cara mengatasinya. Dapatkan informasi bermanfaat terkait ragam jenis penyakit dengan mengunjungi Daftarpenyakit.info Daftar penyakit dan gejalanya . Komodo Island Tours Package Promo memberikan anda harga promo untuk layanan perjalanan komodo island. Komodo island tours akan membawa anda menikmati berbagai destinasi wisata di komodo island yang tidak hanya terkenal akan keindahannya tetapi juga terkenal akan Keunikannya yang berbeda dari destinasi wisata lainnya. Komodo Island Tours Package .
2021年8月12日 00:32
Kesehatan Mental juga merupakan faktor kesehatan yang sangat penting untuk anda perhatikan. Dengan mental yang sehat anda dapat menjaga imunitas tubuh dengan lebih baik serta bekerja dengan lebih baik pula. Ada banyak cara untuk menjaga kesehatan mental. Yuk simak tips menjaga kesehatan mental pada tautan berikut ini. Anak Stunting . Buku mimpi Bergambar tidak hanya memberikan anda tafsir dari mimpi-mimpi tetapi juga memberikan ilustrasi dalam bentuk gambar untuk memudahkan anda menyesuaikan mimpi anda dengan tafsir yang ada di dalam buku. Tafsir mimpi andalah ilmu yang sudah dikenal sejak lama untuk menerjemahkan arti dari suatu mimpi. Tafsir mimpi . Try out SKB kesehatan akan membantu anda untuk mempersiapkan diri dalam menghadapi SKB kesehatan. Pada try out SKB kesehatan ini, anda akan disajikan dengan simulasi soal yang sering muncul pada soal-soal SKB kesehatan. Dengan try out ini, anda dapat lebih siap menghadapi SKB kesehatan dengan peluang kelulusan yang lebih besar. SKB kesehatan umum . equity crowdfunding indonesia dianggap sebagai salah satu cara terbaik bagi UKM untuk mendapatkan bantuan dana, utamanya di masa pandemi seperti sekarang ini. Sistem crowfunding adalah sistem investasi yang dilakukan secara beramai-ramai. Sistem equity crowdfunding Indonesia ini tidak hanya membantu para pengusaha UKM tetapi juga memberikan peluang bagi mereka yang ingin invest. Crowdfunding . jasa backlink terbaik memberikan anda layanan pemasangan backlink dengan harga yang murah dan pemasangan backlink dalam jumlah yang besar. Backlink merupakan salah satu cara terbaik dalam melakukan optimasi website. Dengan menggunakan jasa backlink maka anda tidak perlu lagi direpotkan dengan proses pemasangannya. jasa backlink murah . jasa backlink PBN permanen dan aman merupakan jasa backlink dengan hasil yang lebih optimal dari sekedar pemasangan backlink biasa. Backlink PBN ditanamkan pada artikel yang terkait dengan kata kunci yang ditargetkan sehingga memberikan hasil optimasi yang lebih baik. Backlink PBN juga bersifat permanen dan lebih aman untuk dilakukan. jasa backlink PBN permanen . travel aswindra jaya adalah travel wisata Bali yang menyediakan ragam jenis paket wisata Bali. Travel aswindra jaya juga menyediakan layanan sewa mobil berkualitas yang nyaman serta dilengkapi dengan driver yang handal dan berpengalaman serta profesional dalam mengantarkan anda menikmati berbagai destinasi wisata di Bali. aswindra jaya travel . Paket wisata murah Bali memberikan anda layanan travel wisata Bali dengan harga yang murah. Dengan paket wisata murah Bali ini anda dapat mengunjungi berbagai destinasi wisata di Bali dengan harga yang murah. Paket wisata murah Bali ini juga memiliki ragam jenis variasi yang dapat anda pilih sesuai dengan keinginan anda. Paket wisata di Bali . tas karung yang kuat adalahsalah satu perlengkapan yang wajib dimiliki oleh jasa kurir yang setiap harinya mengantarkan banyak barang. Dengan tas karung yang kuat dan berkualitas ini anda dapat memuat banyak jenis barang dengan mudah dan tidak perlu mengkhawatirkan bobotnya sebab tas karung yang kuat tentu saja dapat mengangkat bobot yang berat. tas motor anti air . kartu SIM adalah kartu yang digunakan untuk menelpon seperti AS, Tri, Excel dan lain-lain. SIM adalah singkatan dari Subscriber Identity Module. Jadi untuk dapat menggunakan smartphone anda secara maksimal, tentu saja anda membutuhkan kartu SIM. Ketika membeli kartu SIM, pastikan anda membeli kartu SIM yang resmi. download video tiktok tanpa watermark . Jasa Website adalah jasa profesional yang membantu anda dalam hal-hal yang terkait dengan proses pembuatan dan optimasi website. Di era informasi ini, memiliki website telah menjadi suatu keharusan bagi suatu usaha. Dengan menggunakan jasa website, anda dapat memiliki website yang dibuat secara profesional tanpa perlu repot. Jasa Pembuatan Website Terbaik . Jubah Pria saat ini mulai trend di kalangan kaum adam sebab tidak hanya nyaman digunakan, jubah pria kini juga telah memiliki ragam jenis desain yang keren. Tidak hanya dari segi desain, jubah pria juga memiliki ragam jenis pilihan warna yang dapat anda pilih sesuai dengan selera anda. Harga jubah pria pun sangat ramah di kantong. Baju Gamis Pria . Print buku adalah salah satu proses yang harus dilakukan jika ingin membuat atau menerbitkan suatu buku. Biaya print buku pun tergantung dari ukuran dan juga jenis kertas yang digunakan. Print buku pun dibedakan ke dalam beberapa standar kualitas, seperti regular, premium dan berwarna. Selain print halaman, tentu saja jasa print buku juga dapat mencetak cover. Cetak buku . Mebel Jepara adalah mebel berkualitas tinggi yang telah dikenal oleh masyarakat luas, tidak hanya di Indonesia tetapi juga di manca negara. Mebel Jepara terkenal karena kualitas kayunya yang tahan lama dan kuat. Tidak hanya itu, mebel Jepara juga terkenal akan keindahannya dengan ragam jenis desain yang dapat anda pilih untuk melengkapi tampilan rumah anda. Toko Mebel Jepara . partisi lipat adalah partisi ruangan yang dapat menjadi alternatif penganti dinding batu. Berbeda dengan dinding batu yang permanen, sesuai dengan namanya, partisi geser dapat di geser sehingga memiliki sifat yang fleksibel jika anda ingin membuka atau menutup ruangan. Saat ini partisi geser datang dengan berbagai bentuk desain yang menarik untuk memperindah ruangan. partisi geser jakarta . tukang taman jakarta akan membantu anda mewujudkan taman impian anda di daerah Jakarta dan sekitarnya. Jika anda memiliki taman di daerah Jakarta atau pun sekitarnya dan ingin memberikan tampilan yang indah pada taman tersebut, maka jangan ragu untuk menggunakan jasa tukang taman Jakarta. jakarta.gardencenter.co.id . Bisnis rumahan online saat ini mulai banyak dilirik oleh orang-orang, utamanya di masa pandemi di mana banyak kegiatan harus dilakukan secara online dari rumah saja. Dengan bisnis rumahan online ini, anda dapat menjalankan bisnis dari rumah saja tanpa perlu keluar rumah atau pun memiliki gedung kantor dan sebagainya. Percetakan online . ACP Seven dan Marks di Denpasar bagi anda yang membutuhkan ACP Seven dan Marks untuk menghiasi gedung anda di daerah Denpasar dan sekitarnya. Di sini anda juga dapat menerima jasa pemasangan ACP Seven dan Marks sebab untuk melakukan pemasangan ACP Seven dan Marks memang dibutuhkan tenaga profesional untuk hasil yang terbaik. Jasa Pemasangan Kaca Curtainwall CW dan Kusen Aluminium . update Google 2021 adalah update google terbaru yang perlu diketahui oleh setiap orang yang ingin menjalankan usaha di dunia online secara serius. Sebagai mesin pencari nomor satu di dunia, google secara terus-menerus melakukan update terhadap sistem pencariannya untuk memberikan hasil pencarian yang terbaik. info update algoritma Google . Pijat panggilan jakarta adalah jasa pijat profesional yang dilakukan oleh terapis pijat yang handal dan berpengalaman untuk membantu menghilangkan rasa lelah dari tubuh anda. Jasa pijat jakarta ini juga menerima panggilan sehingga anda tidak perlu lagi repot-repot datang mengunjungi spa atau tempat pijat lainnya. Pijat panggilan cirebon . Pijat panggilan cirebon juga merupakan jasa pijat profesional untuk anda yang membutuhkan terapis pijat yang handal dan berpengalaman di daerah cirebon atau pun sekitarnya. Dengan pijat panggilan ini anda juga tidak perlu lagi mengunjungi spa atau tempat pijat lainnya, sebab cukup dengan panggilan saja, terapis pijat profesional akan mengunjungi anda. Pijat panggilan surabaya . Pijat panggilan semarang juga merupakan jasa pijat profesional yang menawarkan anda berbagai jenis teknik pijat oleh terapis pijat yang handal dan berpengalaman. Tidak hanya pijatan, anda juga dapat memperoleh perawatan kecantikan seperti lulur pada jasa pijat panggilan semarang. Hubungi jasa pijat panggilan semarang jika anda berada di semarang dan membutuhkan pijatan untuk tubuh yang lelah. Pijat panggilan Surabaya . Cara Menjadi youtuber yang sukses tentu saja sangat dibutuhkan oleh anda yang ingin secara serius menjadi youtuber. Pertama-tama, anda harus menentukan target anda sebagai youtuber. Cara selanjutnya menjadi youtuber adalah memilih kategori yang sesuai dengan keahlian anda untuk diubah menjadi konten youtube. ide youtube tanpa wajah .
2021年8月12日 00:34
Origami is a paper folding art originating from Japan. There are so many people who love to learn the art of origami. If you like origami activities, then there are currently lots of youtube channels that make origami content. You can also learn how to draw by visiting this youtube channel. https://www.youtube.com/channel/UCN_Te-svncQgH6zybi0wN3Q . jasa penerjemah tersumpah adalah jasa profesional yang memberikan anda layanan penerjemah. Penerjemah tersumpah adalah penerjemah yang telah mendapatkan sertifikat dari pemerintah sehingga kemampuannya dalam melakukan penerjemahan juga tidak perlu diragukan lagi. Jasa penerjemah tersumpah juga menjamin kerahasiaan dari dokumen yang anda terjemahkan. jasa penerjemah . cara buka toko di lazada langkah demi langkah untuk membantu anda buka toko di Lazada dengan mudah. Sebagai salah satu online marketplace yang terkenal di Indonesia, Lazada merupakan salah satu tempat yang tepat untuk menawarkan produk anda. Jadi jika anda ingin mebuka toko di Lazada, pelajari cara buka toko Lazada di sini. cara top up ovo pakai pulsa . karpet hotel merupakan salah fitur penting dalam desain interior hotel. Tidak hanya memberikan keindahan, karpet hotel juga ditujukan untuk melindungi lantai agar lebih tahan lama. Karpet hotel tentu saja haruslah karpet yang berkualitas untuk memberikan image eksklusif pada hotel tersebut, jadi karpet yang halus dengan motif yang indah adalah suatu keharusan. karpet ballroom . paket wisata lombok menawarkan anda perjalanan yang menyenangkan mengunjungi berbagai destinasi wisata lombok yang indah. Paket wisata lombok ini juga telah dilengkapi dengan segala fasilitas yang anda butuhkan untuk mengunjungi spot-spot wisata di pulau lombok. Paket wisata lombok juga memiliki banyak pilihan yang dapat anda pilih sesuai dengan style wisata dan dana yang anda miliki. paket tour wisata lombok . Kontraktor acp akan memberikan anda layanan pemasangan ACP yang profesional, handal dan terpercaya untuk hasil pemasangan ACP yang memuaskan. ACP merupakan salah satu cara untuk mendekorasi suatu gedung menjadi terlihat premium dengan biaya yang murah. Untuk melakukan pemasangan ACP, sangat disarankan untuk menggunakan kontraktor ACP yang terpercaya. Kontraktor aluminium composite panel . Penerjemah Tersumpah adalah penerjemah yang telah menerima sertifikat dari pemerintah sehingga setiap hasil terjemahannya bersifat legal. Jadi jika anda butuh menerjemahkan dokumen anda untuk berbagai pengurusan administrasi di luar negeri, maka anda harus menggunakan jasa penerjemah tersumpah. jasa penerjemah tersumpah . Rental Mobil Pamulang BSD merupakan tempat rental mobil yang terletak di daerah Pamulang BSD. Rental mobil di Pamulang BSD ini menyediakan ragam jenis mobil dari berbagai jenis merek, sehingga anda memiliki ragam jenis pilihan mobil rental yang dapat anda gunakan untuk berbagai keperluan anda. Kunjungi rental mobil pamulang BSD di sini. sewa mobil pamulang BSD . Komodo Island is one of the tourist destinations in Indonesia. This island is a breeding ground for the largest lizard in the world commonly called the Komodo dragon. This Komodo dragon is very rare and can only be found on this island. So there are many people who try to use Komodo Island tour packages to be able to see this rare Komodo dragon. Komodo Island Tours Package . Service AC Jakarta siap membantu anda memastikan agar AC anda berfungsi dengan baik. Di negara tropis seperti Indonesia yang memiliki iklim yang lembab dan panas, AC merupakan bagian yang penting dalam keseharian kita. Jadi jika AC anda rusak di daerah jakarta dan sekitarnya, maka jangan ragu memanggil jasa service AC Jakarta. service ac jakarta selatan . Jual Geotextile Woven & Non-Woven di Indonesia yang biasanya digunakan untuk berbagai pembangunan proyek. Geotextile Woven & Non-Woven adalah sejenis kain kapet yang hadir dalam bentuk woven dan non-woven dan terbuat dari bahan polimer Polyesther (PET) atau Polypropylene (PP). Temukan tempat jual Geotextile Woven & Non-Woven di Indonesia di sini. Geotextile di Indonesia . Rumah Aqiqah menyediakan jasa yang memudahkan anda dalam melaksanakan aqiqah. Dengan rumah aqiqah, anda tidak perlu lagi direpotkan dalam mengurus kambing atau pun konsumsi lainnya dalam aqiqah. Rumah aqiqah juga sangat terkenal akan sajiannya yang lezat dan tentu saja halal, untuk menghibur para tamu yang datang. Paket Aqiqah . Berita Kepulauan Kei akan menyajikan anda informasi terbaru seputar kepulauan Kei. Kepulauan Kei adalah salah satu wilayah di Maluku yang terkenal akan pantai pasir putihnya yang sangat halus. Namun tidak hanya berbicara tentang keindahan alam, berita kepulauan Kei juga memuat ragam jenis informasi terupdate lainnya seputar hal-hal yang terjadi di kepulauan Kei. Berita Maluku . Berita Kepulauan Kei memuat ragam jenis informasi tentang ragam jenis kejadian penting yang terjadi di pulau-pulau yang ada di kepulauan Kei. Jadi jika anda ingin selalu update dengan berita terbaru seputar hal-hal penting yang terjadi di pulau-pulau di kepulauan Kei, pastikan anda selalu membaca berita kepulauan Kei. berita ambon . Daftar Harga Fire Alarm sebagai informasi bagi anda yang ingin membeli fire alarm. Harga fire alarm dapat bervariasi tergantung dari tipe, merek dan kualitasnya. Jadi sebelum membeli fire alarm, pastikan anda mencari informasi seputar harga fire alarm agar anda dapat memilih fire alarm terbaik sesuai dengan kebutuhan dan dana yang anda miliki. Jasa Instalasi Fire Alarm . pemasaran digital merupakan salah satu teknik pemasaran yang paling mutakhir di era digital seperti sekarang ini. Teknik pemasaran digital ini mengikuti perkembangan teknologi digital sehingga lebih banyak menjangkau konsumen dengancara yang efektif dan efisien untuk memberikan anda hasil pemasaran yang terbaik. digital marketing . Paket Honeymoon Bali adalah paket wisata Bali yang secara khusus di desain untuk memberikan anda pengalaman honeymoon yang romantis. Anda juga dapat memilih ragam jenis paket honeymoon ini sesuai dengan rute, tempo dan juga dana yang anda miliki. Paket honeymoon Bali akan memastikan anda menikmati perjalanan wisata yang romantis di Bali. Paket Bulan Madu Bali . Pju tenaga surya merupakan salah satu fasilitas yang sangat penting dalam keseharian masyarakat untuk memudahkan masyarakat tetap beraktifitas tanpa kendala di malam hari. PJU (penerangan jalanan umum) ini memiliki sistem penerangan jalanan yang ramah linkungan karena memanfaatkan sistem tenaga surya. Panel tenaga surya . web programmer lampung menyediakan layanan pemrograman website yang membantu anda untuk mendapatkan website yang dibuat dan diprogram secara profesional. Web yang dibuat secara profesional sangatlah penting untuk image bisnis. Meski berpusat di Lampung, jasa web programer ini siap membantu anda di mana saja. web programmer Lampung . cara memulai belajar bahasa pemrogramman biasanya dilakukan dalam beberapa tahap. Sebagai tahap awal dalam cara memulai belajar bahasa pemrogramman setidaknya anda harus paham dengan apa yang dimaksud dengan pemrograman. Setelah memahami makna dari pemrograman barulah kita belajar bahasa pemrograman. masalah umum saat belajar pemrogramman . belajar coding merupakan salah satu bidang yang memiliki potensi besar untuk dipelajari. Coding merupakan proses pembuatan kode untuk membuat suatu program. Besarnya potensi di bidang coding ini membuat saat ini ada banyak orang yang tertarik untuk belajar coding baik secara resmi maupun secara otodidak. kursus bahasa pemrograman . cara memelihara kucing supaya sehat sebenarnya mudah dan murah asal anda tahu cara yang tepat untuk memelihara kucing. Untuk memelihara kucing agar tetap sehat adalah dengan selalu menjaga kebersihan lingkungan rumah anda agar terbebas dari virus, hal ini sangat penting utamanya bagi kucing ras yang memiliki daya tahan yang cukup rentan. channel khusus kucing . paket backlink murah memberikan anda layanan pemasangan backlink yang berkualitas dengan harga yang murah. Jasa pemasangan backlink tidaklah harus mahal, anda hanya perlu menemukan penyedia paket backlink murah yang memberikan anda layanan pemasangan backlink yang berkualitas dengan harga yang murah. Jasa Backlink terbaik .
2021年8月12日 00:35
Kunjungi Youtube Kepointernet agar kamu bisa belajar lebih banyak lagi seputar website. Youtube kepointernet memuat ragam jenis konten dengan informasi penting bagi anda yang ingin belajar cara membuat website atau pun mengoptimasi website dengan baik dan benar secara efektif dan efisien untuk hasil yang optimal. Youtube kepointernet . cara mengganti tema website wordpress dapat dilakukan dalam beberapa cara, baik itu secara otomatis maupun manual. Wordpress juga menjadi pilihan yang sangat baik sebagai platform pembuatan website sebab wordpress memiliki banyak teman yang menarik. Tema wordpress yang dibuat oleh pihak ketiga juga memiliki tampilan yang tidak aklah menariknya. cara membuat website CMS Wordpress . Service laptop mati total merupakan salah satu layanan servide laptop yang dapat anda temukan pada jasa service laptop profesional yang handal dan terpercaya. Jadi jika laptop anda tiba-tiba mati total, anda tidak perlu panik. Segera bawa laptop anda ke service laptop untuk mendapatkan perbaikan dan juga untuk menyelamatkan data yang anda miliki. Service laptop gaming Asus . x banner adalah media promosi berbentuk banner yang dilengkapi dengan tiang penyangga yang berbentuk X. Itulah sebabnya mengapa media promosi ini disebut dengan istilah x banner. X banner ini banyak digunakan untuk mempromosikan suatu produk baru. Tipe x banner ini banyak di sukai karena sifatnya yang portabel dan mudah di bawa-bawa. y banner . roll up banner memiliki fungsi yang sama dengan x banner. Namun berbeda dengan x banner, roll up banner dapat digulung dengan mudah dan dapat di bawa ke mana-mana dengan lebih mudah pula. Roll up banner tidak memerlukan tiang peyangga. Sama halnya dengan x banner, roll up banner merupakan media promosi yang sangat baik untuk mempromosikan suatu hal. bahan banner . dealer mitsubishi menyediakan anda ragam jenis kendaraan mitsubishi yang sudah sangat terkenal akan kualitasnya. Mitshubishi terkenal sebagai kendaraan yang kuat dan tahan lama sehingga sangat sesuai untuk berbagai medan. Jika anda tertarik untuk membeli mobil mitsubishi, maka anda dapat mengunjungi dealer mitsubishi ini. dealer mitsubishi jakarta . hp gaming terbaik bagi anda yang suka bermain game melalui hp. Saat ini ada banyak sekali game keren yang dapat dimainkan melalui hp. Memainkan game dengan hp gaming terbaik tentunya akan memberikan anda pengalaman bermain game yang lebih baik lagi, Hp dengan barterai yang lebih tahan lama dan prosesor yang bekerja lebih cepat. hp terbaru dan harganya . hp gaming 2 jutaan terbaik bagi anda yang ingin bermain game di hp dengan dana ekonomis. Hp gaming tidak perlu mahal, dengan budget 2 jutaan saja kamu sudah memiliki hp gaming terbaik yang dapat memberikan anda pengalaman bermain game yang memuaskan. Yang kamu perlukan hanyalah membaca daftar hp gaming 2 jutaan terbaik ini. hp terbaik di dunia . hp 1 jutaan terbaik bagi anda yang ingin memiliki hp terbaik dengan harga 1 jutaan saja. Saat ini sudah ada banyak hp 1 jutaan di pasaran. Pertanyaannya adalah, hp 1 jutaan manakah yang terbaik. Jadi sebelum anda salah beli, pastikan anda membaca terlebih dahulu informasi tentang hp 1 jutaan terbaik sebelum membeli hp. hp vivo 2 jutaan . Harga tenda membrane terbaru bagi anda pecinta aktifitas outdoor. Tenda membrane adalah jenis tenda yang terbuat dari bahan khusus yang kuat dan mampu menahan panas matahari dan guyuran hujan agar anda merasa nyaman saat tinggal di dalamnya. Harganya juga sesuai dengan kualitasnya. Tenda membrane ini juga dikenal dengan nama tenda awning. Tenda canopy membran . aether BSD adalah cluster rumah 3 lantai di Greenwich park BSD. Ada banyak keuntungan yang bisa anda dapatkan dengan menghuni kawasan clustaer aether di BSD ini. Selain memiliki kawasan yang aman dan tenang, cluster aether juga memiliki banyak fasilitas untuk menjamin kenyamanan para penghuninya. Aether juga memiliki lokasi yang strategis untuk menunjang mobilitas penghuninya. perumahan aether BSD Tangerang . Grosir bedcover murah bagi anda yang mencari bedcover berkualitas dengan harga yang murah. Banyak orang beranggapan bahwa bedcover biasanya memiliki harga yang mahal, namun di sini anda dapat memperoleh bedcover berkualitas dengan harga yang murah untuk memberikan istirahat malam yang berkualitas bagi anda. Grosir sprei murah . email Zimbra adalah salah satu platform email yang saat ini telah banyak digunakan oleh perusahaan-perusahaan dalam berbagai skala. Email Zimbra ini telah dilengkapi dengan berbagai fitur premium yang memampukan anda untuk mempersonalisasi alamat email dari usaha anda sehingga memberikan prestise yang lebih kepada usaha anda. zimbra . Air Freigh merupakan angkutan udara yang telah diakui kecepatannya dalam melakukan pengiriman barang dengan efektif dan efisien baik dalam skala nasional maupun internasional. Karena kemampuannya ini, air freight kebanyakan menjadi layanan utama dari jasa pengiriman barang. Tidak hanya cepat, air freight juga dianggap lebih hemat dalam skala tertentu. Logistics . BAJU OLAHRAGA LENGAN PANJANG merupakan salah satu jenis baju olahraga yang banyak di cari. Meskipun beberapa orang lebih menyukai baju olahraga lengan pendek dengan alasan kenyaman, beberapa orang juga mencari baju olahraga lengan panjang. Biasanya yang mencari baju olahraga lengan panjang adalah kaum muslimah yang suka berolahraga. BAJU OLAHRAGA MUSLIMAH . GROSIR SEPATU OLAHRAGA memberikan anda penawaran harga grosir untuk sepatu-sepatu olahraga berkualitas. Sepatu olahraga merupakan salah satu komponen yang penting dalam berolahraga. Sepatu olahraga yang nyaman tentunya akan membuat anda lebih mudah dalam melakukan olahraga. Temukan grosir sepatu olahraga berkualitas di sini. GROSIR KAOS OLAHRAGA . money changer terbaik di lampung atau tempat penukaran uang dengan penawaran terbaik untuk anda. Meskipun tidak jauh berbeda, setiap money changer biasanya memiliki penawaran harga tersendiri berdasarkan kebijakan masing-masing pemiliknya. Temukan money changer terbaik di lampung dengan mengunjungi situs berikut ini. peniti money changer jakarta . Trenggalek adalah salah satu kabupaten di Jawa Timur yang mempunyai populasi sekitar 700 jiwa. Ada banyak hal yang terjadi setiap hari di kabupaten Trenggalek. Jika anda tertarik untuk mendapatkan kabar berita terbaru tentang hal-hal yang terjadi di kabupaten trenggalek, anda bisa mengikuti media online berita dan kabar trenggalek. berita trenggalek . Saat pandemi seperti ini ada banyak orang yang mengadakan acara dengan konsumsi menggunakan nasi box. Jika anda saat ini berada di Jogja dan membutuhkan catering nasi box, anda bisa menghubungi catering anna. Ada banyak sekali menu khas Jogja dan berbagai daerah lainnya yang bisa anda masukkan ke dalam nasi box pesanan anda. nasi box jogja enak . Ada banyak sekali orang yang menyukai perabotan dan peralatan yang terbuat dari kayu, karena mereka beranggapan hal itu memberikan nilai seni dan estetik tersendiri. Oleh karena itu ada banyak pengrajin kayu yang membuat talenan, mangkok, gelas, nampan, dan sendok dari kayu. Semua peralatan dari kayu ini memang terlihat antik dan memberikan kesan tersendiri. pengrajin piring kayu . Saat ini anda mungkin mau mengikuti try out dokter umum. Anda bisa mengikuti try out dokter umum ini dari bimbel pppk online yang ada banyak di internet saat ini. Bimbel PPPK adalah bimbel bagi anda yang mau menjadi pegawai pemerintah dengan perjanjian kerja. Bimbel ini bisa memberikan anda banyak keterampilan. Bimbel PPPK kami memberikan try out ujian dokter umum jika anda mau mencoba. bimbel pppk dokter umum . Anda juga bisa mengikuti program bimbel pppk online untuk tenaga kesehatan. Kami mempunyai banak sekali materi soal yang sudah digunakan dalam ujian pppk tenaga kesehatan yang bisa anda pelajari. Materi bimbel pppk ini akan memberikan anda banyak gambaran tentang bagaimana ujian ini akan dilakukan. try out pppk kesehatan umum . Kebakaran adalah sesuatu yang tidak kita inginkan, dan oleh karena itu setiap rumah sebaiknya dilengkapi dengan alat pemadam kebakaran yang bisa kita gunakan jika sewaktu-waktu terjadi kebakaran. Anda bisa mendapatkan APAR atau alat pemadam kebakaran atau tabung pemadam kebakaran dengan harga murah dari produksi INOS. Alat pemadam kebakaran ini mempunyai kualitas yang sangat baik untuk anda sediakan di rumah ataupun tempat kerja anda. Harga tabung pemadam .
2021年9月16日 01:05
It is good to see you verbalize from the heart and clarity on this important subject... 먹튀검증
2021年10月05日 18:55
I need to seek destinations with important data on given point and give them to educator our feeling and the article. 카지노사이트
2021年10月07日 04:50
When you use a genuine service, you will be able to provide instructions, share materials and choose the formatting style. mobiledsng.com/product/viagra-price-in-pakistan/
2021年10月09日 18:36
Best Social Plan is the most trusted company for providing social media marketing services. Within some years it has gained popularity as a reliable company to its customers. This company is now managing its activity successfully. It is proved number one company by its quality services. It is noticed that more and more customers are showing their intention to take service from this company. Best Social Plan
2021年10月14日 00:30
Intriguing post. I Have Been pondering about this issue, so a debt of gratitude is in order for posting. Entirely cool post.It 's extremely exceptionally decent and Useful post.Thanks MGWIN88
2021年10月15日 07:45
Wonderful article. Fascinating to read. I love to read such an excellent article. Thanks! It has made my task more and extra easy. Keep rocking. 전국급전
2021年10月17日 18:20
I like review sites which grasp the cost of conveying the fantastic helpful asset for nothing out of pocket. I genuinely revered perusing your posting. Much obliged to you! 토토사이트
2021年10月18日 18:22
I just got to this astonishing site in the relatively recent past. I was really caught with the bit of assets you have here. Enormous thumbs up for making such brilliant blog page! Vloga za vizum ZDA
2021年10月19日 05:07
Hello, this weekend is good for me, since this time i am reading this enormous informative article here at my home. https://mobiledsng.com/product/cialis-20mg-price-in-pakistan
2021年10月19日 19:20
I inquisitive more enthusiasm for some of them trust you will give more data on this subjects in your next articles. Bigg Boss
2021年10月20日 23:42
Decent data, profitable and phenomenal outline, as offer well done with smart thoughts and ideas, bunches of extraordinary data and motivation, both of which I require, on account of offer such an accommodating data here. Gutter Cleaning Oakville
2021年10月21日 00:05
I'm eager to reveal this page. I have to thank you for ones time for this especially awesome read!! I unquestionably extremely enjoyed all aspects of it and I likewise have you spared to fav to take a gander at new data in your site. เว็บสล็อต
2021年10月21日 23:12
Simply unadulterated splendor from you here. I have never expected something not as much as this from you and you have not frustrated me by any stretch of the imagination. I assume you will keep the quality work going on. siti internet Verona
2021年10月23日 20:36
Good subject, comparative writings are I don't know whether they are on a par with your work out. indian visa
2021年10月23日 23:51
You bear through a wonderful opening. I rational soundness unquestionably quarry it besides by and by propose to my buddys. I am reserved they assurance be profited from this scene. Kanada Visumantrag online
2021年10月24日 02:27
These you will then observe the most vital thing, the application gives you a site an effective critical web page: Harga Sewa Excavator
2021年10月24日 04:55
Very good points you wrote here..Great stuff...I think you've made some truly interesting points.Keep up the good work. rent a car beograd
2021年10月25日 04:59 Hello there to everyone, here everybody is sharing such learning, so it's critical to see this website, and I used to visit this blog day by day soap2daygate.com
2021年10月25日 22:24
You re in motivation behind truth a without defect site administrator. The site stacking speed is shocking. It kind of feels that you're doing any unmistakable trap. Furthermore, The substance are ideal gem. you have completed a marvelous activity with respect to this issue! agen sbobet
2021年10月26日 19:05
I went onto your blog while centering just marginally submits. Decent procedure for next, I will be bookmarking without a moment's delay grab your entire ascents... 안전놀이터
2021年10月27日 17:54
Trying to say thanks won't simply be adequate, for the fantasti c clarity in your written work. I will immediately snatch your rss channel to remain educated of any updates. Cartello in plexiglass vietato fumare
2021年10月27日 18:44 Truly value this magnificent post that you have accommodated us.Great site and an incredible subject also I truly get astonished to peruse this. Its better than average. siti internet brescia
2021年10月27日 19:23
You re in motivation behind truth a without defect site administrator. The site stacking speed is shocking. It kind of feels that you're doing any unmistakable trap. Furthermore, The substance are ideal gem. you have completed a marvelous activity with respect to this issue! Bigg Boss 15
2021年10月28日 23:03
Gangaur Realtech is a professionally overseen association having some expertise in land administrations where coordinated administrations are given by experts to its customers looking for expanded an incentive by owning, involving or putting resources into land. 사설토토
2021年11月01日 18:08
Two full thumbs up for this magneficent article of yours. I've really refreshing examining this article today and I figure this might be a champion among other article that I've scrutinized yet. If its all the same to you keep this work proceeding in a comparative quality. best climbing carabiner
2021年11月01日 18:17
There is such a great amount in this article I could never have thought of alone. Your substance gives perusers things to consider in a fascinating way. best binoculars for hunting deer
2021年11月01日 18:26
Such destinations are imperative since they give a huge measurement of valuable data ... best garden tool sets
2021年11月01日 18:34
I'm awed, I should state. Once in a while do I go over a blog that is both enlightening and drawing in, and stunning, you ve hit the nail on the head. Your blog is basic.. best violin case
2021年11月06日 04:06
amazing post.. Thanks for sharing this article.. Looking for more.. nice stuff...<a href="https://soap2day.zone/">https://soap2day.zone</a>
2021年11月06日 04:07
nice post..<a href="https://soap2day.zone/">https://soap2day.zone</a>
2022年3月08日 04:27
Decent data, profitable and phenomenal outline, as offer well done with smart thoughts and ideas, bunches of extraordinary data and motivation, both of which I require, on account of offer such an accommodating data here. Buy LinkedIn Followers
2022年8月06日 23:31
Life Insurance Corporation was established in 1956 and Is the oldest insurance company in India, and it has been providing millions of individuals with their variety of insurance schemes along with giving a good service to the business groups. To have a successful policy on your name, it is mandatory to make the LIC online premium payment or offline in time, LIC Online Payment Login and timely paying the installments of LIC will keep your policy active and that will be helpful in your emergency.LIC does provide various methods to make the premium which can be office and as well online whichever is convenient to the customer, and it is also mandatory to check the payment dates, as it depends on the customer whether they have chosen for monthly, half-yearly or yearly.
2022年12月16日 23:37
2022年12月17日 00:03
2022年12月17日 00:04
2023年3月01日 23:04
<a href="https://pg-slot.game/%e0%b8%a3%e0%b8%a7%e0%b8%a1%e0%b8%9a%e0%b8%97%e0%b8%84%e0%b8%a7%e0%b8%b2%e0%b8%a1/pg-slot-%e0%b9%81%e0%b8%95%e0%b8%81%e0%b8%87%e0%b9%88%e0%b8%b2%e0%b8%a2/">Pg slot แตกง่าย</a> เกมแจ็คพอต PG SLOT เป็นอีกหนึ่งต้นแบบเกมทำเงินยอดนิยมเยอะที่สุดในปี 2021 นี้ มีเรื่องราวชักชวนติดตาม และก็มีภาพกราฟิกที่ชัดเจนงดงามสูงที่สุดอีกด้วยเล่นเลย
2023年3月01日 23:05
[url=https://pg-slot.game/%e0%b8%a3%e0%b8%a7%e0%b8%a1%e0%b8%9a%e0%b8%97%e0%b8%84%e0%b8%a7%e0%b8%b2%e0%b8%a1/pg-slot-%e0%b9%81%e0%b8%95%e0%b8%81%e0%b8%87%e0%b9%88%e0%b8%b2%e0%b8%a2/]Pg slot แตกง่าย[/url] เกมแจ็คพอต PG SLOT เป็นอีกหนึ่งต้นแบบเกมทำเงินยอดนิยมเยอะที่สุดในปี 2021 นี้ มีเรื่องราวชักชวนติดตาม และก็มีภาพกราฟิกที่ชัดเจนงดงามสูงที่สุดอีกด้วยเล่นเลย
2023年8月27日 23:51
Discover the captivating islands of adventure rides with Tour Saint Lucia. Our expert-guided tours lead you through Saint Lucia's most breathtaking landscapes, revealing hidden gems and scenic viewpoints. Immerse yourself in the charm of the Caribbean through our unforgettable island rides.
2023年8月28日 01:14
Unlock a world of e-commerce triumph through our selection of successful Shopify dropshipping stores. These pioneers of the industry have conquered challenges, embraced innovation, and carved out their spaces as leaders in the competitive world of online retail.